
ステッピングモーターとドライバー様のテスト信号発生機です
| 1 |
ステッピングモーターを使用するには回転させるためのパルスが必要です。0~10kHz程度の発振器作ります。PWMのところで使用した555でも良いのですが周波数調整をボリュームで行い絞りきったところで(ほぼ)0にしたいので555ではスイッチ付きボリュームを使用しない限り難しいと思います。またボリューム回転角に対する周波数変化も直線変化は困難(ほぼ無理)です。 今回はVFコンバーター:NJM4151(uA4151)を使用します |
| 2 |
ついでにエンコーダーのところで作った回路を少し手直しして1枚にまとめてみます。 ジョグダイヤルの使えるテスト発振器になります。(ジョグダイヤルは手回しエンコーダーの仕様上1回転24パルスですので、1.8°/ステップのモーターではフルステップでも200÷24≒8.3回転させなければなりません。超小型の18°/ステップのものでしたら丁度よいと思います。 |
| 3 |
回路図 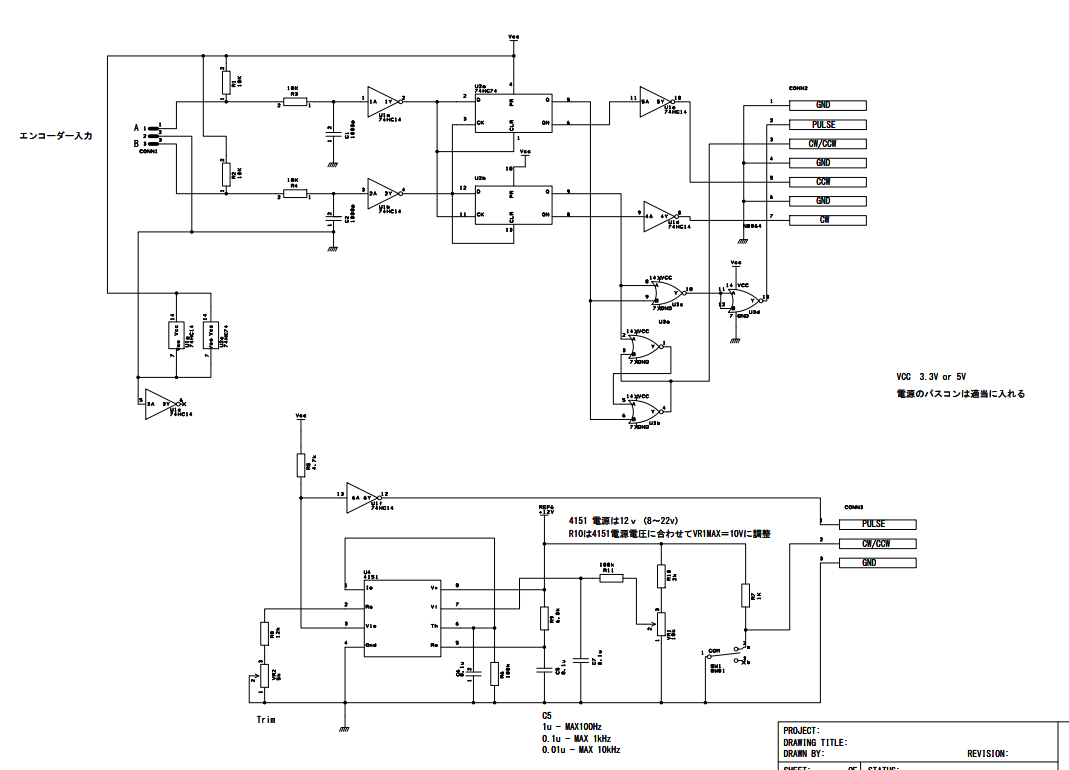
|
| 4 |
別々の回路図を1枚にまとめただけなのでエンコーダーの出力とジェネレーターの出力が別のコネクターから出ています。従って都度コネクターを挿し換える必要があります。 |
| 5 |
実験動画:1
42mm角の一般的なステッピングモーター「MINEBEA:17PM-K212-P1T」仕様不明ジャンク品 (配線が切られていてビスが1本なかった。分解したか?) モーター電源12v,450mA(実測:多分定格電流より少ない),A4988ドライバー フルステップ 0Hzから周波数を上げていき脱調停止まで回します。 100Hz辺りと200Hz辺りで共振しています。1300Hz辺りで回転範囲を超えます。自起動は1100Hzぐらいでしょうか。 1回転200ステップですので1300÷200=6.5回転/秒 390RPMが無負荷での最高回転数です。 |
| 5 |
実験動画:2
上記と同じ組み合わせでハーフステップにします 0Hzから周波数を上げていき脱調停止まで回します。 共振による脱調は減りました。(周波数をよりゆっくり変化させると別の場所でも発生すると思います)下げ方向の脱調時にはそのまま下げれば回転を始めました。上げ方向の脱調時には共振周波数帯を速やかに、 且つ滑らかに増速すれば抜け出せます。1/4ステップ、1/8ステップではより滑らかに回転します。 ハーフステップにしたので1回転400ステップです。8300÷200=20.75回転/秒 1245RPMが無負荷での最高回転数です。 |
| 6 |
実験動画:3
今度はモーターとドライバーを変更します。モーターはアマゾンで購入した得体の知れない20パルス/回転の小型のもの直径15mmのもの、ドライベーは東芝TB6608FNG(秋月さんの変換基板に載せてある)です。 フルステップ、電流は227mA(計算値) 信じられないくらいよく回ります。1000Hzですと50✕60=3000rpmです。 |
| 7 |
実験動画:4
ハーフステップです。2000Hz辺りが限界です。 |
| 8 |
実験動画:5
おまけの動画です。ロジックエンコーダー回路でモーターを回します。 |
ステッピングモーターについて
ブラシ式の直流モーターは電圧を与えれば勝手に回りますがステッピングモーターは回転磁界を与えないと回りません。回転磁界を作るのはステッピングモータードライバーの役目ですが速度信号、回転方向は別途必要です。
ブラシモーターは電圧(電力)に応じて速度変化することが出来ます。電力0のとき回転力を失い自由回転になります。(外部から回転力を与えなければ停止し、与えるとつられて回ります。)また負荷に応じて速度が変わります。
対してステッピングモーターは(電力0では自由回転ですが)停止中は静止トルクがあり外部から回転力を与えても踏ん張って回らないように努力します。そのかわり電力を消費します。(停止中は電力を減らす様に制御することが多いです。)
速度調整ボリューム
F-Vコンバーターを使用しましたので電圧に比例して周波数が変わります。B型ボリューム(回転角度に比例して抵抗値-ひいては電圧)を使用するとMIN付近でもMAX付近でも変化率は同じです。MIN付近では微妙な調整がし難い場合はA型ボリュームを使いましょう。(音量調整に使うタイプです。本来は対数変化するはずのようですが実際はMIN付近とMAX付近は変化率が異なる直線に近く真ん中付近で抵抗値が15%とか20%位で曲線変化しています。)
脱調と自起動
ステッピングモーターを使用するにあたって厄介なのは脱調現象です。ブラシモーターはいきなり電圧(電力)最大にしても、ローターや負荷が停止したままでいようする慣性の都合上ゆっくり(人の目からは瞬間に)と回転を初め目的(負荷とつり合った適当な)の速度になりますが、ステッピングモーターでは負荷とつりあう回転数という事ではなく与えられた速度司令(パルス)に従って回転を始め負荷と関係なくパルスと等速で回転し続けます。このため自起動周波数という回転を始めることが出来る周波数以下でないと回り始めません。回転を始めた後は回転する慣性力が加わりますので自起動周波数以上でも回転することが出来ます。従って回転パルスはいきなり自起動周波数以上にはしないで徐々にあげていく必要があります。
と、ここまでの脱調現象は感覚的にわかりやすいのですが自起動以下のかなりゆっくり回転の時おこる共振脱調現象はわかりにくいです。低い周波数のとき起きやすくモーター自体や負荷の慣性力で特定の周波数で共振していきなり回転力を失います。(回転方向に行ったり来たりする)その特定周波数を外れ周波数を上げるか下げるかすれば回転力を取り戻しますが、そのときはすでに脱調した分のステップ数だけミスしていますので10ステップ(パルス)回転させたつもりが9ステップしか進んでいないなどというようなことが起きます。ステッピングモーターの利点は与えるパルス数分だけ正確に回転するということですがこの利点が失われますので注意が必要です。これを避けるには共振周波数帯を避けるのが一番ですがその速度が欲しい場合はダンパーを付ける、電流を下げる(下げると1ステップ回転後の停止時に行きすぎないので振動が減る)、フルステップからハーフステップやクォーターステップにする、言った対策が有効です。共振ですので負荷が変わると収まりますのでギヤだったらアソビをなくすとか、出来ることならタイミングベルトに変えるという方法もあります。
HzとPPS
呼び方だけの問題ですが回転周波数はHZではなくPPS(パルス パー セック:秒あたりのパルス数)と表現するほうが一般的かも知れません。
Copyright © 面白半分