
今更ですがH8-3664のネタです。どちらも秋月さんの商品です。
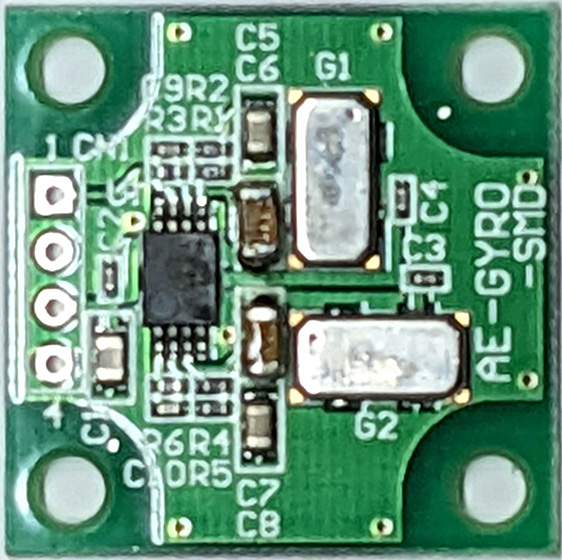
使用したのは3664基板、gyro(ENC-03R)基板、加速度センサー(KXM50)基板、メモリー24LC512
同じものは販売終了のようですが似たものは今でもあるようです。
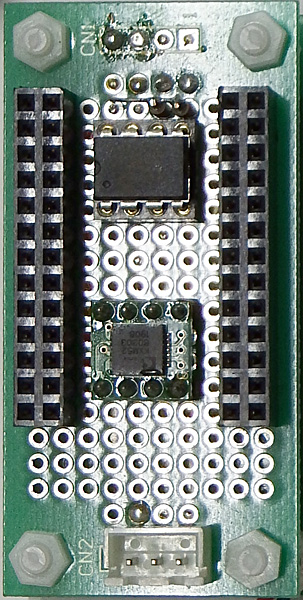
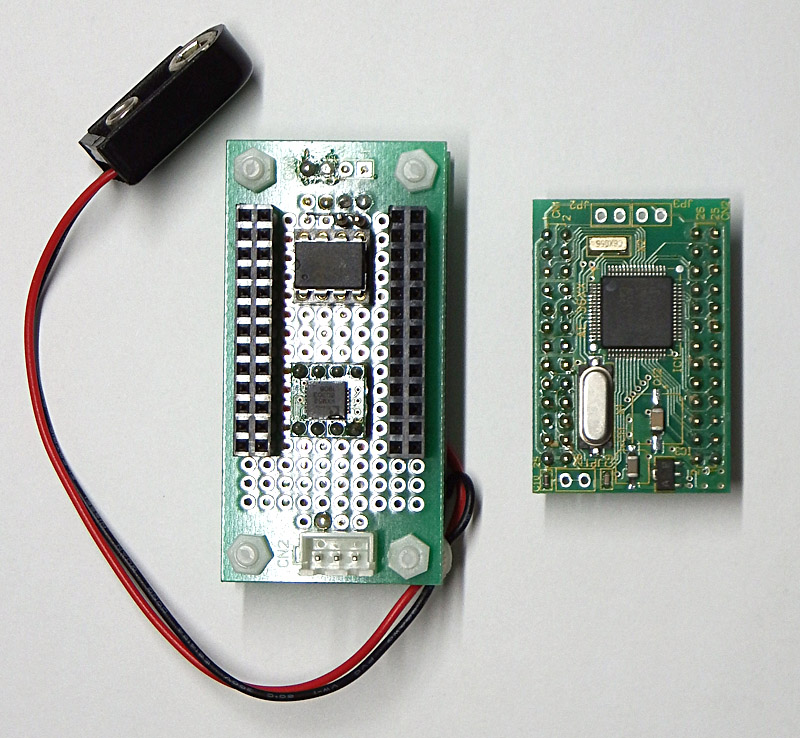
現物の写真です。3664基板、24LC512とKXM50、gyroの3段重ねです
下側がジャイロ基板ですがずいぶん大きいですね。60x30あります。今の通販コードK-04912(13x14mm)と中身は ほぼ同じと思います。
開発環境
HEW GCC ですがバージョンは覚えていません。依頼を受けて制作したものです。用途は小型模型飛行機に取り付けて機体の傾きなどを記録しする。後に分析して姿勢制御をするためのアルゴリズムを 考察するというものです。受け持ったのは記録までですのでそのデータを実際どのように分析するかは知りません。IICバスを初めて使ったのがこの プログラムでした。
小型にするため電源スイッチは有りません。電池は単4または単5を3本使用しています。多分LR44あたりでは電流容量不足になるだろう。単5なら 重量は何とかクリア?ぐらいな気持ちで選択しています。
電池をつなぐと記録が始まります。メモリー容量まで 使い切る(または」電池を外す)と終了します。JP2を先に短絡してから電池をつなぐとRS232Cからテキスト化した保存された数値データが連続出力されます。 teratermなどのターミナルで受け取れます。ホスト側の取りこぼしは考慮していません。そこから先はexcelの取り込んで加工するようですが関与していません ので解りません。
回路図中 jp2とjp3について記述してありますが依頼者に対し念のための注意書きです。秋月さんの資料中、端子の対応リストは正しいですが 回路図はjp2とjp3が入れ替わっています。回路図を見なければ何も問題ありません。
Copyright © 面白半分
 上から見たところ
上から見たところ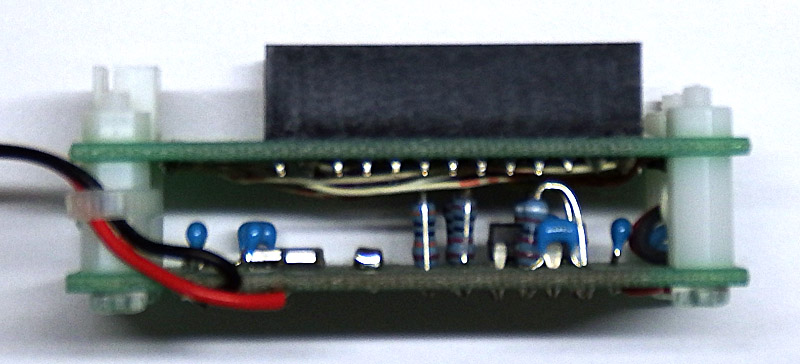 横から見たところ
横から見たところ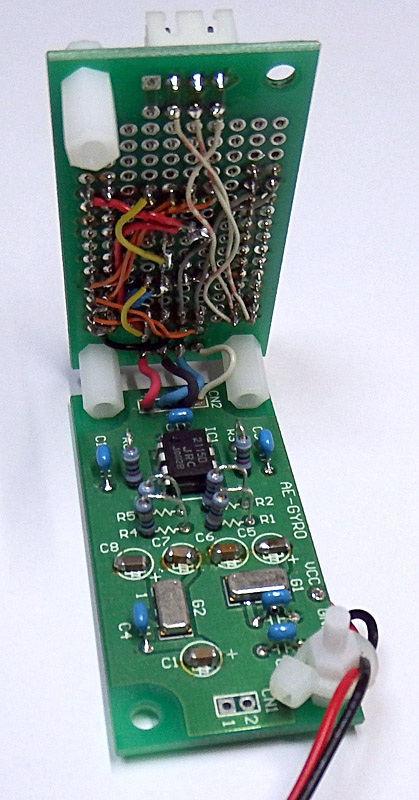 開いたところ
開いたところ